狄克斯特拉算法
狄克斯特拉算法能够找出加权图中前往 X 的最短路径(这里并不一定是物理路径,也可能是某种度量指标最小的路径)。
注意:广度优先搜索,能够在非加权图中找出前往 X 的最短的路径,也可以理解为段数最少的路径。
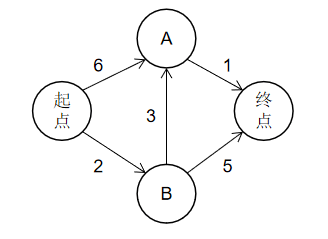
上面那张称为加权图👆
- 如果是使用广度优先搜索,查找出来的起点到终点,最短是 起点 → A → 终点。因为它只需两段就到达了。
- 如果是使用狄克斯特拉算法,查找出来的起点到终点,最快是 起点 → B → A → 终点。因为他的权重最小,如果理解的话,可以把该例子的权重看成耗费时间。
加权图:带权重的图。即上图。
非加权图:不带权重的图。即上图把数值删掉。
环(边会形成一圈的图)👇
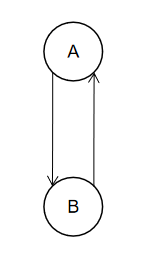
无向图每一条边都是一个环,因为无向图两个节点彼此指向对方。狄克斯特拉算法只适用于有向无环图 。
TIP
图的算法,重点要学会怎么画图,画出图来分析就事半功倍。
注意
如果有负权边,就不能使用狄克斯特拉算法。在包含负权边的图中,要找出最短路径,可使用另一种算法——贝尔曼-福德算法。
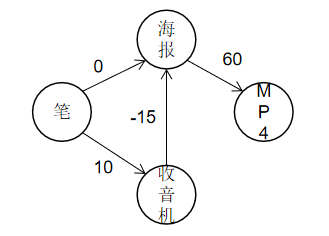
什么是负权边?
比如你有一支笔,目标换一张MP4,现在可以一支笔直接换一张海报或加10块钱换一个收音机,海报换MP4要加60块钱,然后收音机换海报不但不用给钱,还可得15块钱。这就是负权边。
- 直接用笔换海报费用 0 元
- 先换收音机再换海报 可赚 5元
实现👇(图一)
- 找出”最便宜“的节点,即某种度量最小的节点。即 B 节点。
- 更新该节点的邻居节点的开销。即 B 节点 的所有邻居节点 A、终点。
- 重复这个过程,知道对图中每个节点都这样做了。
- 计算最终路径。
javascript
// 使用散列表表示 图
const graph = {
start: {
a: 6,
b: 2
},
a: {
fin: 1
},
b: {
a: 3,
fin: 5
},
fin: {}
}
// 实时保存节点开销
const costs = {
a: 6,
b: 2,
fin: Infinity // 无穷大
}
// 保存节点父节点
const parents = {}
// 保存处理过的节点
const processed = []
/**
* @description: 找出开销最低且未处理的节点
* @param {object} costs 所有节点
* @return {string} lowestCoseNode 开销最小的节点
*/
function findLowestCostNode(costs) {
let lowestCost = Infinity // 最小开销
let lowestCoseNode = null // 最小开销的节点
// 遍历所有节点
for (let node in costs) {
const cost = costs[node] // 保存该节点的开销
if (cost < lowestCost && !processed.includes(node)) {
lowestCost = cost
lowestCoseNode = node
}
}
return lowestCoseNode
}
function lowest() {
let node = findLowestCostNode(costs)
while (node) {
const cost = costs[node]
const neighbors = graph[node]
for (let key in neighbors) {
const newCost = cost + neighbors[key]
if (costs[key] > newCost) {
costs[key] = newCost
parents[key] = node
}
}
processed.push(node)
node = findLowestCostNode(costs)
}
}
lowest()
console.log('最少开销是', costs['fin'])
console.log('路径是终点←', parents['fin'], '←', parents[parents['fin']], '←起点')
// 输出:
// 最少开销是 6
// 路径是终点← a ← b ←起点至于这个怎么运行自己 debug 一下和自己画一下图就很清晰了。这题节点少好分析。
总结:
- 狄克斯特拉算法用于在加权图中查找最短路径。(注意这里最短路径的意思)
- 仅当权重为正时狄克斯特拉算法才有用。
- 狄克斯特拉算法只适用于有向无环图。