广度优先搜索
广度优先搜索又称为宽度优先搜索;是一种图的搜索算法。它是盲目的,它并不考虑结构的可能位置,而是展开检查图中所有节点,直到找到结果为止。通常使用队列的结构。时间复杂度O(人数 + 边数)
广度优先搜索解决的问题:是否存在A到B的路径,如果有,查询出来的路径是最短的。
图
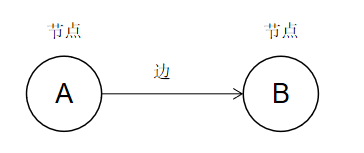
图由节点和边组成,一个节点可能与多个节点直接相连,这些节点被称邻居。
图还分为有向图和无向图。
有向图,边是有方向的,即上面例图。
- 入度:以某点为终点的边的条数,即 A 的入度为0,B 的入度为1。
- 出度:以某点为起点的边的条数,即 A 的出度为1,B 的出度为0。
- 度:入度 + 出度,即 A 的度为1,B 的度也为1。
无向图,边是无方向的,即例题中把边的箭头去掉,就变成无向图。
举例:你现在想要寻找一位可靠的代购,便宜代购一台笔记本,因此你在你朋友中查找👭🏻👭🏻👭🏻。
首先你会创建一个朋友名单,依次检查名单中每一个人,看看他是否是代购。如果是则完成,不是则继续往下检查。
假设你的朋友中没有代购,那么你就必须从朋友的朋友中查找(即加入到朋友名单中)。
这个过程就是广度优先搜索算法。
如图👇
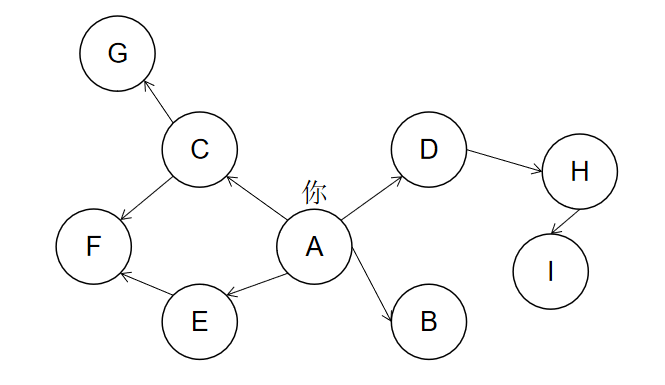
思考:
- 例图为有向图还是无向图?
- A的出度、入度、度分别为多少?
- F的出度、入度、度分别为多少?
分析图🧐
朋友是一度关系,即上图的 B C D E。
朋友的朋友是二度关系,即上图的 F G H。
以此类推,一度关系胜过二度关系,二度关系胜过三度关系...
实现这种目的的数据结构,最方便的就是队列。
什么是队列?
队列就是一种先进先出(First In First Out,FIFO)的数据结构,与栈(后进先出)不一样。打个比方,排队上公交车,排在前面的先上,后来添加的排在后面。从队列中取出一个元素称为出队,即上公交车的动作;将一个元素加入队列的称为入队,即去排队的动作。
代码实现
javascript
// 假设I为代购
// 判断是否是代购
function isAgent(people) {
return people === 'I'
}
const friends = {
A: ['B', 'C', 'D', 'E'],
B: [],
C: ['F', 'G'],
D: ['H'],
E: ['F'],
F: [],
G: [],
H: ['I'],
I: []
}
const find = (() => {
let queue = friends['A'] // 初始队列
const found = [] // 已查找
return function () {
while (queue.length) {
const friend = queue.shift()
// 判断是否已经查找过
if (found.includes(friend)) {
continue
}
if (isAgent(friend)) {
console.log(friend, '是代购');
return true
} else {
queue = queue.concat(friends[friend]) // 往后入队
found.push(friend) // 记录已经查找
}
}
}
})()
find()解析:
- 首先将你的邻居添加到队列中
- 每次从队列中取一个出来,如果是代购则中止,如果不是代购则把他的朋友加入到队列中。
- 记录已经查找过的人。因为 F 分别是 C 和 E 的共同朋友,查找一次后没必要再做一次无用功。最重要的是避免 A → B → C → A 这种情况,如果不这样做,可能导致无限循环。
拓扑排序
有向无环图才有拓扑排序,即每一个顶点只出现一次,若 A → B,则不存在B → A。而且是有序的。
如:吃早餐 → 刷牙 → 起床,吃早餐依赖于刷牙,刷牙依赖于起床。